ch04 · 神经网络与训练要素¶
ch03 我们背下了 PyTorch 的「前向 + 反向 + 优化」MLP 模板。
本章以我们熟悉的 MLP 为最简载体,讲解适用于所有神经网络的通用训练技术:初始化、优化器、学习率调度、Dropout、归一化(BN/LN)。
这些是后面 Transformer 训练能不能稳定收敛的决定性因素。
学习目标¶
- 理解为什么"初始化错了 → 训不动",能区分 Xavier vs He vs 朴素初始化
- 区分 SGD / SGD+momentum / Adam / AdamW 的核心差异,知道何时用哪个
- 理解 LR 调度的"为什么",能解释 cosine / step / warmup 的动机
- 解释 Dropout 在训/推阶段的差异;理解为什么 LLM 全用 LayerNorm 而非 BatchNorm
前置依赖¶
- ch02(链式法则 / 梯度直觉)、ch03(PyTorch 训练循环模板)
1. 反向传播的工程视角¶
ch02 把反向传播当数学讲。本节把它当工程问题看:每个工程细节背后都有一个 "如果不这样做就翻车" 的故事。
1.1 计算图复用与 retain_graph¶
PyTorch 的计算图默认 backward 一次就被释放(省显存)。再 backward 会报:
99% 训练场景一次足够。需要多次反传同一张图(典型如 GAN(Generative Adversarial Network,生成对抗网络):同一份 fake_data 既要更新 G 又要更新 D;或一个 loss 拆两次反传;或算高阶梯度)才用 loss.backward(retain_graph=True)。M3 不会遇到,混个眼熟。
1.2 zero_grad 必须在 backward 之前¶
ch03 §2.2 已强调。再补一个细节:set_to_none=True(PyTorch 1.7+ 默认就是这个)。
set_to_none=True 直接把 .grad 设回 None,比"填零"(PyTorch < 1.7)更省一次显存写入;唯一区别是某些自定义优化器需要先判 if p.grad is not None。
1.3 梯度爆炸 / 消失:用数值看¶
不做任何归一化的深网络,前向激活值会指数级炸或衰减。最快诊断方法:每隔几步打印各层梯度范数:
此处的归一化:指对网络中间层激活值(activations,即每层线性/卷积输出后的中间张量)的归一化。不是对输入数据、不是对权重、不是对梯度。
for name, p in model.named_parameters():
if p.grad is not None:
print(f"{name}: grad_norm={p.grad.norm().item():.3e}")
经验阈值:
< 1e-7→ 梯度消失(学不动)> 1e3→ 梯度爆炸(很快变 nan)nan / inf(NaN = Not a Number、Inf = Infinity,浮点非法值/无穷大) → 已经爆了,回退到上一个 ckpt(checkpoint,模型权重检查点)+ 减小 lr / 加 grad clip
Gradient clipping 是常用救命药:
意思:把所有参数梯度看成一个长向量,范数超过 1.0 就等比例缩放回 1.0。
grad clip 是事后救火——梯度炸了再削。下一节讲的初始化是事前防火:从源头让每层激活/梯度方差稳定,避免一上来就爆。两者通常一起用。
2. 参数初始化¶
一句话:初始化 ≠ 锦上添花,是网络能不能训起来的前提。 直觉:每层输出方差应保持稳定,否则前向几层就炸/消,反向梯度同理。
2.1 三档对照¶
| 方案 | 公式(fan_in 是输入维度) | 配什么激活 |
|---|---|---|
| 朴素正态 \(\mathcal{N}(0, 1)\) | std = 1 | 不要用,几层就炸 |
| LeCun(Yann LeCun,Xavier 简化版) | std = \(\sqrt{1/\mathrm{fan\_in}}\) | sigmoid / tanh |
| Kaiming(何恺明,又叫 He 初始化) | std = \(\sqrt{2/\mathrm{fan\_in}}\) | ReLU 系(含 GELU(Gaussian Error Linear Unit,高斯误差线性单元) / SiLU(Sigmoid Linear Unit,S 形线性单元)) |
严格说 Xavier(Xavier Glorot,Glorot 初始化)的完整式是 \(\sqrt{2/(\mathrm{fan\_in} + \mathrm{fan\_out})}\),同时让前向激活与反向梯度方差都稳定。在 fan_in ≈ fan_out 时与上面 LeCun 形式接近,本章用单 fan_in 简化。
ReLU 把负半轴砍掉,输出方差减半,所以 He 比 Xavier 多了个 \(\sqrt{2}\) 系数补回来。
2.2 PyTorch 默认初始化¶
nn.Linear 默认走 Kaiming 均匀(uniform 版的 He)。nn.Conv2d 同。所以普通 MLP(Multilayer Perceptron, 多层感知器)/CNN(Convolutional Neural Network,卷积神经网络)你不动它就对了。
需要手动初始化的场景:
def init_weights(m: nn.Module) -> None:
if isinstance(m, nn.Linear):
nn.init.kaiming_normal_(m.weight, nonlinearity="relu")
if m.bias is not None:
nn.init.zeros_(m.bias)
model.apply(init_weights) # 递归遍历所有 submodule
LLM 训练里更常见的是 GPT-2 / LLaMA 风格初始化(小标准差如 0.02),M2 ch06 会再讲。
自检¶
- 用朴素 \(\mathcal{N}(0, 1)\) 初始化一个 10 层 ReLU MLP,前向第几层激活会爆?
- 为什么 He 比 Xavier 多个 \(\sqrt{2}\)?
答案速查
-
大约 4–5 层后激活值数量级开始失控。可以用
01_init_compare.py实测 -
ReLU 砍掉负半轴 → 输出方差变成原来的 1/2 → 要把方差扩大 2 倍补回来 → std 乘 \(\sqrt{2}\)
3. 优化器¶
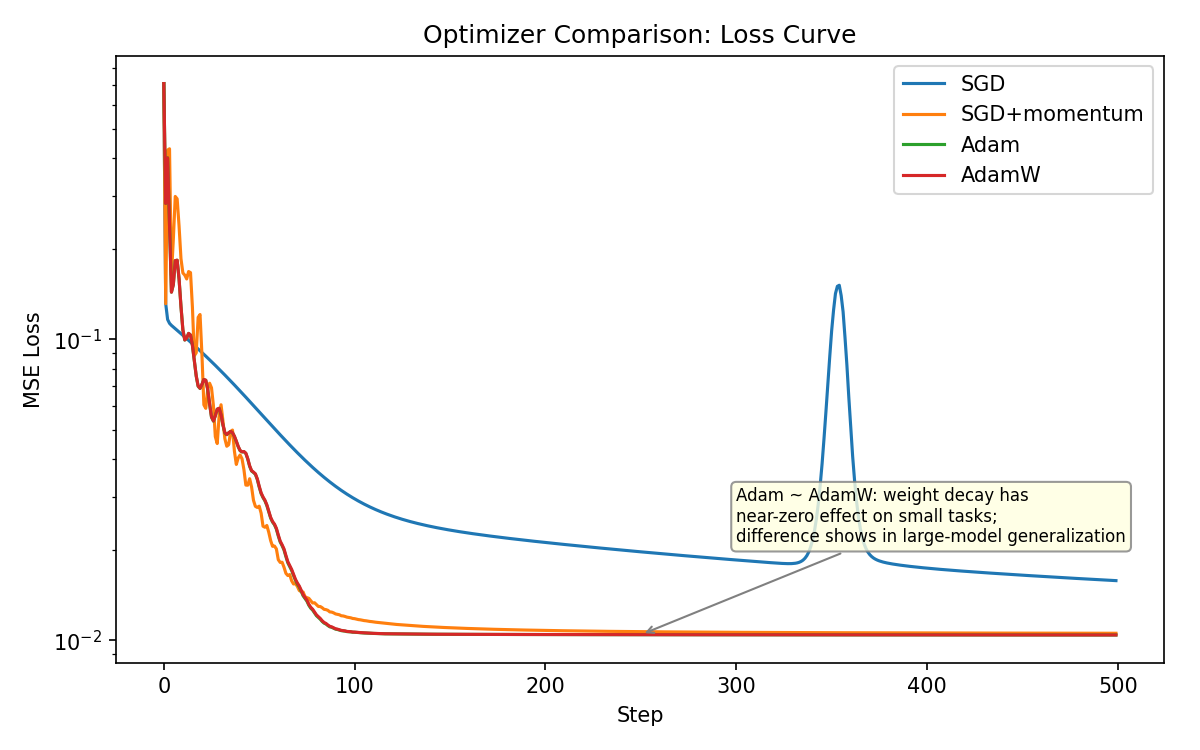
3.1 四档主流对照¶
| 优化器 | 一句话特性 | 何时用 |
|---|---|---|
| SGD(Stochastic Gradient Descent,随机梯度下降) | 纯梯度下降 | 简单凸问题、教学;现代深网络极少单独用 |
| SGD + momentum | 累积"惯性方向",跨过窄峡谷 | 视觉任务(ResNet 时代)、LLM 预训练偶见 |
| Adam(Adaptive Moment Estimation,自适应矩估计) | 一阶矩 + 二阶矩自适应学习率 | NLP(Natural Language Processing,自然语言处理) / Transformer 默认 |
| AdamW(Adam with decoupled Weight decay,权重衰减解耦版 Adam) | Adam 的 weight decay 修正版 | LLM 预训练 / SFT(Supervised Fine-Tuning,监督微调)的事实标准 |
走势图(运行
Playground/ch04-nn-training/02_optimizer_compare.py --plot生成):
3.2 momentum 的直觉¶
v 是梯度的指数滑动平均(β 通常 0.9)。累积同向梯度让步子变大、抵消反向噪声。直觉:滚下山的小球积攒动量,能冲过小坑。
3.3 Adam = momentum + 自适应学习率¶
§3.2 的 momentum 只解决了"方向平滑"。但不同参数的梯度量级可能差几个数量级——某些参数梯度天天 0.001,另一些天天 10。用同一个 lr 更新,小梯度的参数永远追不上。
Adam 的思路:给每个参数一个独立的有效学习率。
它维护两个滑动平均(每个参数各一份):
- \(m\):梯度的滑动均值(= momentum,方向信号)
- \(v\):梯度平方的滑动均值(= 衡量这个参数的梯度"波动有多大")
m ← β₁·m + (1-β₁)·g # 方向(同 momentum)
v ← β₂·v + (1-β₂)·g² # 幅度(g² 是逐元素平方)
w ← w - lr · m / (√v + ε) # 更新(简化版)
实际实现还有 bias correction(训练初期 m、v 从 0 起步偏小,需修正):
t 为当前步数。前几步 \(1-\beta^t\) 很小,修正量大;步数增多后趋近 1,修正消失。PyTorch Adam 内部自动处理,使用者无需手写。
β₁(典型 0.9)= \(m\) 的滑动系数,功能等同 §3.2 momentum 的 β,控制方向平滑。 β₂(典型 0.999)= \(v\) 的滑动系数,Adam 独有,控制波动估计的记忆长度。β₂ 更大意味着 \(v\) 变化更缓慢、估计更稳定。
关键在最后一行的 \(\frac{m}{\sqrt{v}}\):
- 某参数梯度波动大(\(v\) 大)→ \(\sqrt{v}\) 大 → 除以大数 → 步子变小(别冲过头)
- 某参数梯度波动小(\(v\) 小)→ \(\sqrt{v}\) 小 → 除以小数 → 步子变大(加速追上)
数值例子:参数 A 梯度平方均值 \(v_A = 100\),参数 B 的 \(v_B = 0.01\)。 有效步长比 = \(\frac{1/\sqrt{100}}{1/\sqrt{0.01}} = \frac{0.1}{10} = 1:100\)。 Adam 自动给 B 的学习率放大了 100 倍——这就是"自适应"。
\(\epsilon\)(典型 1e-8)防分母为零。
3.4 过拟合、正则化与 weight decay¶
过拟合(Overfitting):模型在训练集上 loss 很低,但在新数据上表现差。本质是模型"背答案"而非学规律。参数越多、模型越大,越容易过拟合。
正则化(Regularization):所有用来对抗过拟合的手段的统称。核心思路:给模型加约束,限制它的"自由度",逼它学到更泛化的解。常见手段包括 Dropout(§5)、数据增强、早停(early stopping)、以及本节要讲的 weight decay。
L2 正则:最朴素的正则化之一。在 loss 后面加一项惩罚权重大小的东西:
直觉:权重越大惩罚越重 → 逼模型用尽量小的权重完成任务 → 不容易在某几个参数上"押重注"去记住训练样本。
对 \(w\) 求导,L2 项贡献一个额外梯度 \(\lambda w\),更新变成:
最后那项 \(-lr \cdot \lambda \cdot w\) 每步把权重往 0 拽一点——所以也叫 weight decay(权重衰减)。在普通 SGD 里,L2 正则和 weight decay 数学完全等价。
LLM 预训练几乎必加 weight decay(典型 \(\lambda = 0.1\))。模型太大、数据虽多但参数更多,不加容易过拟合。
3.5 AdamW:weight decay 的正解¶
上一节得到结论:SGD + L2 = SGD + weight decay,每个参数被均匀衰减,没问题。
但 Adam 里加 L2 就出问题了。
回忆 Adam 的更新(§3.3):
现在加 L2 正则,梯度从 \(g\) 变成 \(g + \lambda w\):
weight decay 的实际力度变成了 \(lr \cdot \lambda w / \sqrt{v}\)——被 \(v\) 控制了。
这导致反直觉的结果:
- 波动大的参数 → \(v\) 大 → \(1/\sqrt{v}\) 小 → decay 被削弱(最不稳定的参数反而最少被约束)
- 波动小的参数 → \(v\) 小 → \(1/\sqrt{v}\) 大 → decay 被放大(本来就稳定的参数反而被过度约束)
这和"正则化应该约束不稳定参数"的初衷完全相反——这就是 Adam + L2 的已知缺陷。
AdamW 的修法:把 weight decay 从梯度通路中拿出来,不经过 \(\sqrt{v}\) 缩放,直接在参数上减:
每个参数被均匀衰减,与波动幅度无关。回到了 SGD 里 weight decay 的正确行为。
LLM 预训练几乎一律 AdamW。PyTorch 一行:
与 ch03 的对照:ch03 MNIST 用的是
Adam(lr=1e-3)不带 weight decay——小模型小数据可以省。本节配置面向 LLM 预训练,M3 起一律 AdamW。
param_groups一瞥:实操中 LayerNorm(§6 详讲)参数和 bias 通常不加 weight decay(它们维度小、加正则反而伤性能),靠optimizer = AdamW([{"params": decay, "weight_decay": 0.1}, {"params": no_decay, "weight_decay": 0.0}], lr=3e-4)分组配置。M3 ch09 详解。
自检¶
- 同一个网络用 SGD 和 Adam,初始 lr 一般谁大?为什么?
- 为什么 LLM 预训练用 AdamW 而不是 Adam?
答案速查
-
SGD 大(典型 1e-2 ~ 1e-1),Adam 小(典型 1e-4 ~ 1e-3)。Adam 自带 \(1/\sqrt{v}\) 自适应放大,名义 lr 已被隐式放大,需要手动调小
-
Adam 的 weight decay 实现等价于"波动大的参数被较少正则化",与正则化目的相反;AdamW 把 weight decay 与梯度更新解耦,对大模型泛化和稳定性更友好
4. 学习率调度¶
固定 lr 的两个问题:
- 前期太大 → 震荡 / 发散;前期太小 → 收敛慢
- 后期太大 → loss 在最小值附近徘徊;后期太小 → 早期就这样
解法:lr 随训练动态变化。
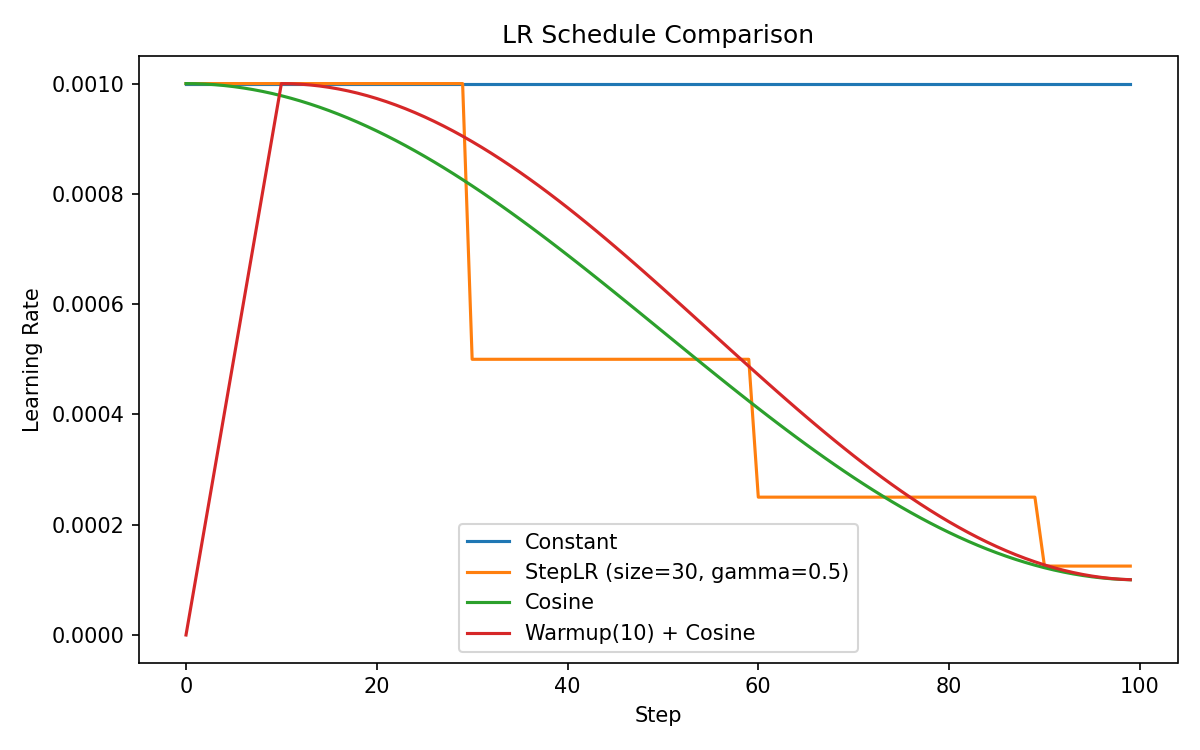
4.1 三种常见 schedule¶
| 名称 | 形状 | 用法 |
|---|---|---|
| StepLR | 阶梯式衰减(每 N 步乘 0.1) | 简单 / 视觉任务老牌 |
| CosineAnnealing | 余弦曲线从 max → min | LLM 预训练默认 |
| Warmup + Cosine | 前 K 步线性升到 max,再 cosine 衰减到 min | LLM 预训练事实标准 |
走势图(运行
Playground/ch04-nn-training/03_lr_schedule.py --plot生成):
4.2 为什么 LLM 都要 warmup¶
训练前期参数随机,梯度方差极大。直接上高 lr 容易把参数推到"再也回不来"的位置。warmup(前几百到几千步线性升 lr)让网络先"探探路"再放开。
伪代码骨架:
def get_lr(step: int, warmup_steps: int, total_steps: int, lr_max: float, lr_min: float) -> float:
if step < warmup_steps:
return lr_max * step / warmup_steps # 线性 warmup
progress = (step - warmup_steps) / (total_steps - warmup_steps)
return lr_min + 0.5 * (lr_max - lr_min) * (1 + math.cos(math.pi * progress)) # cosine
PyTorch 提供 torch.optim.lr_scheduler.CosineAnnealingLR、OneCycleLR 等开箱方案,M4 训 echo-mini 时手写一份就行。
自检¶
- warmup 期可以省吗?跳过会怎样?
- cosine 衰减到的
lr_min一般取多少?为什么不直接到 0?
答案速查
-
小模型 / 小数据可以省。大模型一旦省了,前几百步极易 loss 飞到 nan,没救只能从头来。代价比加几行 schedule 高得多
-
通常取
lr_max的 1/10(如 max=3e-4 → min=3e-5)。直接到 0 后期等于不学,浪费算力且有时反而 loss 反弹
5. Dropout¶
5.1 训练时随机丢神经元¶
直觉:强迫网络不要依赖某些"明星神经元",提升泛化。
为什么能提升泛化:每次前向传播随机丢掉不同的神经元,等于每次训练的是一个不同的"子网络"(原网络的子集)。最终模型相当于隐式地把指数级多个子网络的预测做了平均——这和集成学习(ensemble)用多个模型投票的效果类似,但不需要真的训多个模型。
放哪:常见放在激活函数之后、下一层 Linear 之前。
典型 MLP 层序:
为什么放在激活之后:Dropout 要丢的是"激活值"(神经元的输出信号),激活函数算完才有最终输出信号。如果放在激活之前(即 Linear 之后、ReLU 之前),丢掉的是线性变换的原始输出——ReLU 本身已经会把负值置 0,和 Dropout 的置 0 效果部分重叠,浪费了 Dropout 的"随机性预算"。
最后一层(输出 logits)后不放——不能 dropout 输出。
5.2 训/推不一致的关键细节¶
训练丢一半神经元,推理时全保留——激活值期望就翻倍了。Dropout 在训练时主动乘 1/(1-p) 补偿(叫 inverted dropout),推理时什么都不用做。
没切 eval 直接推理 = bug(指标偏低且每次结果不一样)。
5.3 LLM 里 Dropout 用得少¶
GPT-2/3、LLaMA 系列预训练阶段 Dropout 一般设为 0 或极小(0.0–0.1)。原因:
- 数据足够多时 Dropout 几乎没收益
- 与 Pre-LN 结构(LayerNorm 放在子层之前,§6.3 展开)、warmup、AdamW 一起用时它的正则化作用被替代
- SFT / 微调阶段会重新启用(数据量小,需要正则)
6. 归一化:BatchNorm vs LayerNorm¶
归一化的共同目的:把每层激活值拉回均值 0、方差 1 附近,让训练更稳。 BatchNorm(BN,批归一化) 沿 batch 维统计,LayerNorm(LN,层归一化) 沿特征维统计。下文用 BN/LN 简称。
6.1 BatchNorm:沿 batch 维统计¶
最经典的 nn.BatchNorm2d 吃 CV(Computer Vision,计算机视觉)形状 (N, C, H, W),对每个 channel 在 (N, H, W) 三个维度上求均值/方差:
(也有 nn.BatchNorm1d 吃 (N, C) 或 (N, C, L)。这里举 2d 版只是因为它最常被讨论。)
数值例子:输入 (N=2, D=3),BN 对每一列(特征维)在 batch 维上求均值/方差:
输入 x: 特征0 特征1 特征2
样本0: [ 1.0, 2.0, 3.0 ]
样本1: [ 3.0, 4.0, 9.0 ]
每列均值 μ: [ 2.0, 3.0, 6.0 ]
每列方差 σ²: [ 1.0, 1.0, 9.0 ]
归一化(逐列):
样本0: [-1.0, -1.0, -1.0 ]
样本1: [ 1.0, 1.0, 1.0 ]
注意:统计跨样本(竖着算),所以 batch 越小,均值/方差越不准。
BN 的问题:
- batch 太小(< 8)时统计量噪声大,反而拖累训练
- 推理时用训练阶段的 running statistics(而非像训练时那样现算,因为用户输入的是单/小值 batch),训推计算方式不一致
- 在 RNN(Recurrent Neural Network,循环神经网络) / 序列长度可变的场景几乎不能用(不等长序列需 padding 补 0,padding 位置的假值会污染跨样本统计量)——包括 Transformer
6.2 LayerNorm:沿特征维统计¶
输入 (N, ..., D),LN 对每个样本在最后一维(feature dim)上求均值/方差。
数值例子:同一份输入 (N=2, D=3),LN 对每一行(特征维)独立求均值/方差:
输入 x: 特征0 特征1 特征2
样本0: [ 1.0, 2.0, 3.0 ] ← μ=2.0, σ²=0.667
样本1: [ 3.0, 4.0, 9.0 ] ← μ=5.33, σ²=6.889
归一化(逐行):
样本0: [-1.22, 0.0, 1.22]
样本1: [-0.89, -0.51, 1.40]
注意:统计在每个样本内部(横着算),与 batch 中其它样本完全无关。batch=1 也能正常算。
归一化后还会乘可学习 γ 加可学习 β(默认 elementwise_affine=True):
为什么需要:归一化把值强制压到均值 0、方差 1,但网络某些特征可能确实需要更大的尺度或非零偏移。γ(缩放)和 β(偏移)是可学习参数,让网络在"稳定起点"的基础上自由调整,不损失表达力。M2 ch06 讲的 RMSNorm(Root Mean Square Norm,均方根归一化)就是 LN 的简化版——只除 RMS、去掉 β、有时也去掉 γ。
LN 的优点:
- 与 batch size 无关,batch=1 也能用
- 训推一致(同一种统计公式)
- 序列每个位置独立归一化,天然适配变长序列
所以 LLM 全用 LN(或它的变种 RMSNorm)。BN 和 LLM 几乎绝缘。
6.3 Pre-LN vs Post-LN(M2 详讲)¶
残差连接(Residual Connection):把子层的输入原样加回到子层输出上的一条捷径,保证梯度有直通路径(ch06 详讲):
Transformer 里 LN 放在残差之前还是之后直接影响训练稳定性。简短结论:
- Pre-LN(LN 在残差前):训稳,主流
- Post-LN(LN 在残差后,原版 Transformer):需精细 warmup,不稳
ch06 会画图详解,这里先记结论。
自检¶
- batch_size=2 训练含 BN 的网络有什么问题?换成 LN 呢?
- 为什么 Transformer 不能用 BN?
答案速查
-
BN:batch 太小,每个 batch 的均值/方差噪声大,running stats 估计偏差,loss 震荡甚至无法收敛。LN:完全没影响,每个样本独立算,与 batch size 解耦
-
(a) 序列长度可变,BN 的 channel 统计无意义;(b) 推理时常 batch=1 或长序列流式,BN running stats 与训练分布严重不一致;(c) attention 让不同位置 token 之间相互影响,BN 的"位置独立"假设被破坏
7. 练习¶
落到 Playground/ch04-nn-training/:
| 脚本 | 内容 |
|---|---|
01_init_compare.py |
朴素 / Xavier / He 初始化在 10 层 ReLU MLP 上的激活方差对比 |
02_optimizer_compare.py |
SGD / Momentum / Adam / AdamW 在合成数据上的 loss 曲线(加 --plot 出走势图) |
03_lr_schedule.py |
固定 / Step / Cosine / Warmup+Cosine 四种 lr 曲线可视化(加 --plot 出走势图) |
04_dropout_bn_ln.py |
Dropout 训/推差异;小 batch 下 BN 翻车 vs LN 稳定 |
跑法同 ch03。所有脚本不依赖外部数据,3060 12GB / Mac / CPU 都秒级跑完。
思考题¶
- 如果你的 Transformer loss 在第 200 步突然 nan,你会按什么顺序排查?(涉及本章 lr / clip / init / 数据)
- AdamW 的
weight_decay=0.1在 LLM 预训练里很常见。0.1 看起来不大,为什么对几亿/几十亿参数模型有显著影响? - 假设你设计一个新的归一化算子,希望同时具备 LN 的"训推一致"和 BN 的"feature 维白化"——你会怎么设计统计量?(这不是无聊的脑洞,是 GroupNorm / RMSNorm 的来源)
参考资料¶
- Kaiming He et al., "Delving Deep into Rectifiers":He 初始化原论文
- Diederik Kingma, "Adam: A Method for Stochastic Optimization":Adam 原论文
- Loshchilov & Hutter, "Decoupled Weight Decay Regularization":AdamW 原论文
- Ba et al., "Layer Normalization":LN 原论文
- GPT-2 / LLaMA 模型卡 / 训练配方:现代 LLM 实际使用的 init / optimizer / lr 配置参考